På uppdrag och tillsammans med Combitech AB så deltar vi i en liten grupp som ska utveckla ett system för protabel anntenmätning. Projektet innefattar att ta fram hårdvara enligt de krav på vikt, funktion och pris som är satta, installera och modifiera denna på valt operativsystem, skriva ett program som utför och loggar de operationer som krävs samt att utveckla en applikation för att presentera den insamlade datan.
Mycket av den kommunikation som sker världen runt idag sker genom radiosignaler som skickas med hjälp av antenner. Combitech AB driver idag anläggningen "Antennmätplats Arboga" (AMPA). Där utförs mätningar på olika typer av farkostantenner för att optimera antennernas funktion. När detta görs utgår man idag från en fast antenn som utför mätningar på en farkost som placeras på en mätplats. Farkostens roteras sedan för att man ska kunna mäta hur dess antenner hanterar radiosignaler från olika vinklar. Då antennerna som idag utför mätningarna är stationära behöver det objekt som ska mätas transporteras till Arboga för att en mätning ska kunna genomföras.
Detta projekts syfte är att skapa ett portabelt mätsystem som kan placeras på t.ex. en drönare för att mäta antennstyrka och som inte är beroende av geografisk placering. Detta skulle möjliggöra att mätobjektet inte behöver transporteras till Arboga för en mätning vilket kan vara resurskrävande ur både ett ekonomisk och tidsmässigt perspektiv.
Projektets delar
Positionsförbättring - RTK
Ett första steg i ett portabelt mätsystem är att säkerställa det relativa avståndet mellan antenn under test och den portabla mätenheten. Att använda sig av vanlig GPS går inte då det inte ger en tillräckligt exakt position. Detta kan man lösa genom att använda sig av Real-Time Kinematik (RTK) som går ut på att man har en basstation som står still och räknar ut ett snitt av sin position och på det sätt kan räkna ut hur mycket fel GPS signalen visar. Denna information kan sedan basstationen skicka vidare till det vi kallar Portable Messure Unit (PMU) denna teknik gör att man går från ett par meters felmarginal till ett par centimeter. Tekniken finns, utmaningen ligger i att implementera RTK i det portabla mätsystemet och få det att fungera på ett tillfredsställande vis.
Kontrollapplikation – CU
För att kunna styra de olika enheterna, spara ner och initiera nya mätningar krävs en kontrollapplikation som kan köras från en dator. Detta program ska även kunna visualisera pågående mätning i någon form. Dels för att operatören ska se att allt fortskrider som det ska och dels för eventuella åskådare ska kunna följa mätningen i realtid. Kontrollapplikationen behöver utvecklas från scratch och ska vara skriven i programmeringsspråket Python.
Vidareutveckling - CU
När vi kommit så långt i projektet att vi har ett fungerande mätsystem kommer kontrollapplikationen – CU att vidareutvecklas. Det finns då ett önskemål om att man ska kunna läsa in utförda mätningar, kalibrera dem, visualisera dem för presentation samt spara ner dem i olika filformat. Detta kommer förmodligen att ske som en utveckling av befintligt program men kan också komma att bli ett fristående program.
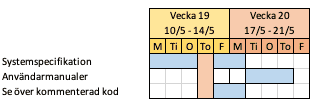
Dokumentation
För att projektets arbete ska vara spårbart och repeterbart behövs dokumentation. Denna dokumentation kommer dels att bestå av kommentarer i befintlig kod men samt av en rad dokument. Dessa dokument kommer utformas som manualer för att vara behjälplig att repetera projektet vid behov och felsökning.
Utöka antalet frekvenser
Man kan idag mäta en frekvens åt gången. Det finns ett önskemål om att kunna mäta upp mot tio frekvenser samtidigt. Detta kräver att man konfigurerar HackRF och mjukvaran för PMU och Portable Transmitting Unit (PTU) för att kunna hantera flera samtidiga mätningar.
Positionering för inomhusbruk
Efterfrågan om att kunna göra dessa mätningar inomhus blir allt större och om projektet går som planerat kommer vi att titta på en lösning även för det. Beroende på hur avancerat det är att implementera kan det komma att bli fråga för en senare uppgradering av systemet och därmed inte bli en del av detta projekt.
Utvecklingsmiljö
Flera av våra systemkomponenter kommer att drivas av opertivsystemet Linux - Rasberry Pi OS. Programmering kommer att ske i Python och vår blog är byggd med GatsbyJS.
Linux
Precis som Windows, iOS och Mac OS är Linux ett operativsystem. Ett operativsystem är programvara som hanterar alla hårdvaruresurser som är kopplade till din stationära eller bärbara dator. För att uttrycka det enkelt hanterar operativsystemet kommunikationen mellan din programvara och din hårdvara.
Python
Python är ett objektorienterat programmeringsspråk på hög nivå med dynamisk semantik. Python är ett mycket attraktivt programmeringsspråk för snabb applikationsutveckling, samt för användning som skripts- eller limspråk för att ansluta befintliga komponenter.
GatsbyJS
Gatsby kan användas för att bygga statiska webbplatser som är progressiva webbappar, följa de senaste webbstandarderna och är optimerade för att vara högpresterande. Den använder den senaste och populära tekniken inklusive ReactJS, Webpack, GraphQL, modern ES6 + JavaScript och CSS.
Kontaktinfo
Vill du komma i kontakt med oss når du oss via våra kontakt uppgifter nedan.
Du kan även besöka vår hemsida eller någon av våra sociala medier genom att klicka på ikonerna i menyn.